Рис. 1
ПОЧЕМУ И КАК ПРЕЦЕССИРУЕТ ГИРОСКОП
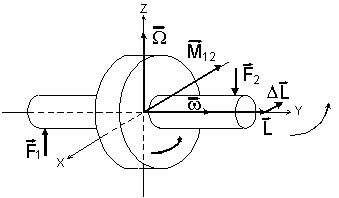
Гироскопом называется быстровращающееся симметричное твердое тело, ось вращения которого может изменять свое направление в пространстве. Если к оси гироскопа приложена пара сил F1 и F2, создающая момент M12, перпендикулярный к плоскости, в которой лежат силы, то, вопреки ожиданию, гироскоп поворачивается не вокруг оси x, перпендикулярной плоскости пары, а вокруг оси z, лежащей в этой плоскости и перпендикулярной к оси симметрии тела. Такое движение гироскопа называется прецессией.
Рис. 1 |
Поскольку при прецессии гироскоп участвует в сложном движении, вращаясь сразу вокруг двух осей, момент импульса гироскопа не направлен строго вдоль оси y. Однако, если угловая скорость прецессии мала по сравнению с угловой скоростью собственного вращения гироскопа, то можно приближенно считать, что направления момента импульса и угловой скорости собственного вращения совпадают, т.е. L=Iω, где I - момент инерции гироскопа относительно оси вращения, а ω - вектор угловой скорости вращения, причем при прецессии вектор L, очевидно, все время поворачивается т.е. получает приращение ΔL по направлению. |
Но, согласно уравнению моментов, скорость изменения со временем вектора момента импульса равна вектору момента сил:
 |
(1) |
Таким образом, приращение момента импульса при прецессии определяется моментом сил, приложенных к оси. Если прецессия происходит с угловой скоростью Ω, то за время dt ось гироскопа повернется на угол dφ =Ω dt и приращение dL момента импульса составит dL=[Ω dt,L]. Тогда, из (1) получается следующее соотношение, связывающее угловую скорость прецессии с моментом сил, действующих на ось:
| M12=[Ω,L] | (2) |
Уравнение (2) полностью описывает движение гироскопа при установившейся прецессии, т.е. при Ω= const. Следует предостеречь от попыток применения вышеприведенных соображений для анализа движения гироскопа в начальный момент времени, когда к оси уравновешенного гироскопа прикладывается момент сил. В рамках рассмотренной приближенной теории, в которой принимается, что направления момента импульса и угловой скорости собственного вращения гироскопа совпадают, описать, как гироскоп переходит в режим установившейся прецессии, нельзя.
Чтобы неформально разобраться, почему и как происходит прецессия, прежде всего заметим, что при установившемся движении для поддержания вращения оси гироскопа вокруг оси z, т.е. прецессии, не нужны силы, создающие вращательный момент, направленный вдоль этой оси (при отсутствии трения, конечно). Таким образом, если прецессия по каким-то причинам уже установилась, то движение происходит в соответствии с уравнением (2), и отсутствие момента сил, который бы вращал гироскоп вокруг оси z, не удивительно. Выясним теперь, каким образом при прецессии возникает тот момент сил, который компенсируется моментом M12 пары сил, приложенных к оси. Ведь ясно, что раз гироскоп не поворачивается под действием пары сил F1 и F2 вокруг оси x, то при прецессии должны возникать какие-то силы, создающие уравновешивающий момент. Найдем эти силы. Проще всего это сделать в системе отсчета, связанной с осью прецессирующего гироскопа. Очевидно, что эта система отсчета вращается с угловой скоростью прецессии Ω и является, таким образом, неинерциальной. В неинерциальной системе отсчета на движущуюся материальную точку действует кориолисова сила инерции. Рассмотрим движение точек гироскопа, пересекающих в данный момент ось z (рис.2). Сила Кориолиса, действующая на элементарный объем с массой Δm в окрестности точки A равна FA=2Δm[vA,Ω], причем поскольку угловая скорость собственного вращения гироскопа велика (гироскоп - быстровращающееся тело), велик и модуль скорости vA, и сила Кориолиса оказывается значительной. Направление этой силы указано на рис.2.
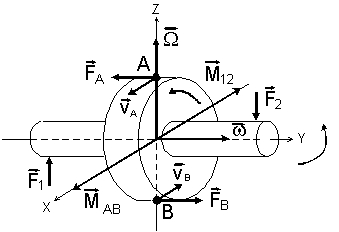 Рис.2 |
Нетрудно сообразить, что силы, действующие на все остальные элементы гироскопа, находящиеся в данный момент в верхней полуплоскости, направлены так же, как сила FA. Теперь рассмотрим силу Кориолиса, действующую на элемент гироскопа в окрестности точки B. Поскольку скорость vB=-vA, то FB=-FA. Теперь становится очевидно, что силы Кориолиса, действующие на гироскоп в верхней и нижней полуплоскостях создают момент MAB, причем направление этого момента противоположно моменту пары сил F1 и F2, приложенных к оси. Сумма моментов M12 и MAB оказывается равной нулю, и поэтому ось гироскопа и сохраняет горизонтальное положение. |
Во время предыдущего рассмотрения предполагалось, что прецессия уже установилась, т.е. Ω>0. Осталось, однако, невыясненным, каким образом в начальный момент, когда Ω=0, пара сил F1 и F2, стремящаяся, на первый взгляд, повернуть ось гироскопа вокруг оси x, приводит вместо этого к прецессии вокруг оси z. Ведь ясно, что пока установившейся прецессии нет, все соображения, рассмотренные выше, несостоятельны.
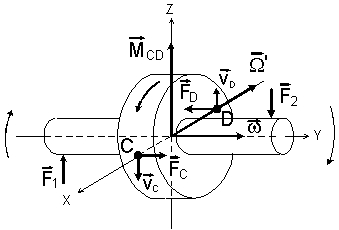 Рис.3 |
Когда
закрепленной оси гироскопа
предоставляется свобода, то
естественно ожидать, что пара
сил F1 и F2
начнет
вращать гироскоп вокруг оси x. Так оно на самом
деле и происходит. Снова будем
рассматривать движение в
системе отсчета, связанной с
осью гироскопа (рис.3). И опять эта
система отсчета оказывается
неинерциальной. На этот раз - из-за вращения
вокруг оси x. Пусть
угловая скорость этого
вращения равна Ω'. Тогда на
точки гироскопа C и D,
пересекающие
в данный момент ось x, действуют
одинаковые по модулю и
противоположно направленные
силы Кориолиса |
Скорость прецессии постепенно возрастает, с ней возрастает и момент MAB (см. выше, как образуется момент сил MAB), который в какой-то момент времени становится больше, чем M12. Тогда, так как моменты MAB и M12 имеют противоположные направления (см. рис. 2), то вращение вокруг оси x начинается в обратную сторону. Но это приводит к изменению знака угловой скорости Ω'. В результате скорость прецессии начинает уменьшаться. Действительно, из-за изменения знака угловой скорости Ω' направления сил Кориолиса FC и FD меняются на противоположные. Вследствие этого изменяется знак момента MCD, запустившего прецессию, и теперь этот момент ее тормозит. Когда скорость прецессии окажется меньше необходимой, чтобы компенсировать момент пары сил F1 и F2, знак Ω' снова изменится, и процесс начнет повторяться. Такое колебательное движение гироскопа вокруг оси x называется нутацией. Очень скоро из-за трения нутация прекращается и гироскоп переходит в режим установившейся прецессии, при котором | MAB|= | M12| . Движение оси гироскопа в рассмотренном переходном режиме показано схематически на рис.4.
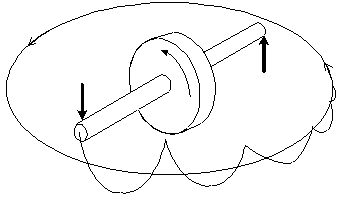
Рис. 4
Так работает гироскоп. Тот, кто понял, сумеет ответить на следующий вопрос. За счет работы каких сил гироскоп приобретает кинетическую энергию, связанную с прецессией, когда зафиксированной оси неуравновешенного гироскопа предоставляется свобода, и он начинает прецессировать? (Ответ)
ЛИТЕРАТУРА
1. Матвеев А.Н. Механика и теория относительности, - М.: Высшая школа, 1986.
2. Фейнман Р., Лейтон Р., Сэндс М. Фейнмановские лекции по физике, вып. 1-2. - М.: Мир, 1976.